Какими свойствами обладают векторные величины

Ве́кторная величина́ — физическая величина, являющаяся вектором (тензором ранга 1). Противопоставляется с одной стороны скалярным (тензорам ранга 0), с другой — тензорным величинам (строго говоря — тензорам ранга 2 и более). Также может противопоставляться тем или иным объектам совершенно другой математической природы.
В большинстве случаев термин вектор употребляется в физике для обозначения вектора в так называемом «физическом пространстве», то есть в обычном трёхмерном пространстве классической физики или в четырёхмерном[1] пространстве-времени в современной физике (в последнем случае понятие вектора и векторной величины совпадают с понятием 4-вектора и 4-векторной величины).
Употребление словосочетания «векторная величина» практически исчерпывается этим. Что же касается употребления термина «вектор», то оно, несмотря на тяготение по умолчанию к этому же полю применимости, в большом количестве случаев всё же весьма далеко выходит за такие рамки. Об этом см. ниже.
Употребление терминов вектор и векторная величина в физике[править | править код]
В целом в физике понятие вектора практически полностью совпадает с таковым в математике. Однако есть терминологическая специфика, связанная с тем, что в современной математике это понятие несколько излишне абстрактно (по отношению к нуждам физики).
В математике, произнося «вектор», понимают скорее вектор вообще, то есть любой вектор любого сколько угодно абстрактного линейного пространства любой размерности и природы, что, если не прилагать специальных усилий, может приводить даже к путанице (не столько, конечно, по существу, сколько по удобству словоупотребления). Если же необходимо конкретизировать, в математическом стиле приходится или говорить довольно длинно («вектор такого-то и такого-то пространства»), или иметь в виду подразумеваемое явно описанным контекстом.
В физике же практически всегда речь идёт не о математических объектах (обладающих теми или иными формальными свойствами) вообще, а об определённой их конкретной («физической») привязке. Учитывая эти соображения конкретности с соображениями краткости и удобства, можно понять, что терминологическая практика в физике заметно отличается от математической. Однако она не входит с последней в явное противоречие. Этого удаётся достичь несколькими простыми «приемами». Прежде всего, к ним относится соглашение об употребление термина по умолчанию (когда контекст особо не оговаривается). Так, в физике, в отличие от математики, под словом вектор без дополнительных уточнений обычно понимается не «какой-то вектор любого линейного пространства вообще», а прежде всего вектор, связанный с «обычным физическим пространством» (трёхмерным пространством классической физики или четырёхмерным пространством-временем[2] физики релятивистской). Для векторов же пространств, не связанных прямо и непосредственно с «физическим пространством» или «пространством-временем», как раз применяют специальные названия (иногда включающие слово «вектор», но с уточнением). Если вектор некоторого пространства, не связанного прямо и непосредственно с «физическим пространством» или «пространством-временем» (и которое трудно сразу как-то определённо охарактеризовать), вводится в теории, он часто специально описывается как «абстрактный вектор».
Всё сказанное ещё в большей степени, чем к термину «вектор», относится к термину «векторная величина». Умолчание в этом случае ещё жёстче подразумевает привязку к «обычному пространству» или пространству-времени, а употребление по отношению к элементам абстрактных векторных пространств скорее практически не встречается, по крайней мере, такое применение видится редчайшим исключением (если вообще не оговоркой).
В физике векторами чаще всего (а векторными величинами — практически всегда) называют векторы двух сходных между собою классов:
- в классической физике (классической механике, электродинамике в классической трёхмерной формулировке и в других областях физики, преимущественно сформировавшихся до начала XX века) векторными величинами или просто векторами называют, как правило, векторы обычного трёхмерного пространства — то есть обычные «геометрические» векторы или, быть может, отличающиеся от таковых на скалярный множитель (в том числе и на множитель размерный). Хотя в этих областях физики фактически и применялись разнообразные объекты, осознаваемые нынешней математикой как векторы — в физической терминологии это почти не получило отражения (так например, преобразование Фурье в классической электродинамике и классической теории сплошных сред весьма интенсивно применяется, но традиционно почти не рассматривается в контексте классической с использованием слова «вектор» применительно к функциям, хотя с математической точки зрения это было бы вполне законно[3]). Пожалуй, единственным явным исключением из правила является достаточно свободное векторами элементов фазового или конфигурационного пространств[4].
- в релятивистской физике[5] (начиная с Пуанкаре, Планка и Минковского) и, в значительной степени, в современной теоретической физике под векторами и векторными величинами понимаются прежде всего векторы четырёхмерного пространства-времени[6] и непосредственно с ним связанные (отличающиеся на скалярный множитель от векторов 4-перемещения) — 4-векторы.
- в квантовой механике, квантовой теории поля и т.д. слово «вектор» стало стандартно применяться и для обозначения такого объекта, как вектор состояния. Этот вектор может иметь в принципе любую размерность, а как правило — бесконечномерен. Однако путаницы практически не возникает, поскольку слово вектор тут используется исключительно в устойчивом сочетании вектор состояния, и никогда отдельно, за исключением разве что случаев, когда контекст уже настолько очевиден, что путаница просто невозможна (например, при повторном употреблении отдельного слова вектор в отношении объекта, который только что перед этим был назван, как вектор состояния или при использовании однозначных специфических обозначений — таких например, как скобки Дирака, — или соответствующих им терминов. Для ряда векторов специфических пространств используются специальные слова (такие, как например спиноры) или явные названия (вектор цветового пространства, изотопический спин и т.д.). Притом что словосочетание «векторная величина» практически никогда не применяется к таким абстрактным векторам. Всё это позволило термину «векторный» сохранить в качестве, пожалуй, основного смысла — смысл 4-вектора. Именно этот смысл вкладывается в термины векторное поле, векторная частица (векторный бозон, векторный мезон); сопряжённый смысл в подобных терминах имеет и слово скалярный.
Примеры векторных физических величин: скорость, сила, поток тепла.
Генезис векторных величин[править | править код]
Каким образом физические «векторные величины» привязаны к пространству? Прежде всего, бросается в глаза то, что размерность векторных величин (в том обычном смысле употребления этого термина, который разъяснён выше) совпадает с размерностью одного и того же «физического» (и «геометрического») пространства, например, пространство трёхмерно и вектор электрического поля трехмерен. Интуитивно можно заметить также, что любая векторная физическая величина, какую бы туманную связь она не имела с обычной пространственной протяжённостью, тем не менее имеет вполне определённое направление именно в этом обычном пространстве.
Однако оказывается, что можно достичь и гораздо большего, прямо «сведя» весь набор векторных величин физики к простейшим «геометрическим» векторам, вернее даже — к одному вектору — вектору элементарного перемещения, а более правильно было бы сказать — произведя их всех от него.
Эта процедура имеет две различные (хотя по сути детально повторяющие друг друга) реализации для трёхмерного случая классической физики и для четырёхмерной пространственно-временной формулировки, обычной для современной физики.
Классический трёхмерный случай[править | править код]
Будем исходить из обычного трёхмерного «геометрического» пространства, в котором мы живём и можем перемещаться.
В качестве исходного и образцового вектора возьмём вектор бесконечно малого перемещения. Довольно очевидно, что это обычный «геометрический» вектор (как и вектор конечного перемещения).
Заметим теперь сразу, что умножение вектора на скаляр всегда даёт новый вектор. То же можно сказать о сумме и разности векторов. В этой главе мы не будем делать разницы между полярными и аксиальными векторами[7], поэтому заметим, что и векторное произведение двух векторов даёт новый вектор.
Также новый вектор даёт дифференцирование вектора по скаляру (поскольку такая производная есть предел отношения разности векторов к скаляру). Это можно сказать дальше и о производных всех высших порядков. То же верно по отношению к интегрированию по скалярам (времени, объёму).
Теперь заметим, что, исходя из радиус-вектора r или из элементарного перемещения dr,
мы легко понимаем, что векторами являются (поскольку время — скаляр) такие кинематические величины, как
Из скорости и ускорения, умножением на скаляр (массу), появляются
- импульс,
- сила.
Поскольку нас сейчас интересуют и псевдовекторы, заметим, что
- угловая скорость,
- момент импульса — появляются совершенно понятным образом.[8]
- с помощью формулы силы Лоренца напряжённость электрического поля и вектор магнитной индукции привязаны к векторам силы и скорости.
Продолжая эту процедуру, мы обнаруживаем, что все известные нам векторные величины оказываются теперь не только интуитивно, но и формально, привязаны к исходному пространству. А именно все они в некотором смысле являются его элементами, так как выражаются в сущности как линейные комбинации других векторов (со скалярными множителями, возможно, и размерными, но скалярными, а поэтому формально вполне законными).
Современный четырёхмерный случай[править | править код]
Ту же процедуру можно проделать исходя из четырёхмерного перемещения.
Оказывается, что все 4-векторные величины «происходят» от 4-перемещения,
являясь поэтому в некотором смысле такими же векторами пространства-времени, как и само 4-перемещение.
Виды векторов применительно к физике[править | править код]
- Полярный или истинный вектор — обычный вектор.
- Аксиальный вектор (псевдовектор) — на самом деле не является настоящим вектором, однако формально почти не отличается от последнего, за исключением того, что меняет направление на противоположное при изменении ориентации системы координат (например, при зеркальном отражении системы координат). Примеры псевдовекторов: все величины, определяемые через векторное произведение двух полярных векторов.
- Для сил выделяется несколько различных классов эквивалентности.
Примечания[править | править код]
- ↑ Во многих современных теориях размерность фундаментального пространства-времени больше, чем 4; впрочем, это в принципе довольно мало что меняет, к тому же ни одна из этих теорий пока не достигла статуса общепризнанной и достаточно подтвержденной.
- ↑ Во многих современных теориях, например, в теории струн, пространство-время не 4-мерно, а имеет большее количество измерений, однако является чаще всего достаточно прямым и простым обобщением своего 4-мерного прототипа, а возможность путаницы практически исключена контекстом самих этих теорий (не говоря уже о том, что размерность тогда часто указывается явно, а других, кроме размерности, отличий от обычного пространства-времени не предполагается).
- ↑ Для того, чтобы избежать противоречий между физической и математической терминологией, существует такой способ: вместо выражения «вектор такого-то пространства» применять синонимичное выражение «элемент такого-то пространства», математически полностью эквивалентное, но не создающее путаницы при употреблении наряду с обычных для физики терминологических традиций.
- ↑ трудно сказать, что послужило этому в большей степени: то, что эти пространства (особенно конфигурационное) выглядят слишком прямым обобщением обычного физического пространства, в частных случаях просто с последним совпадающим, или то, что теоретическая механика, в которой эти понятия возникли, считается разделом не физики, а математики.
- ↑ Под релятивистской физикой тут прежде всего понимается стандартная 4-мерная формулировка релятивистской механики, электродинамики и других теорий. В принципе, такая формулировка используется и для квантовых теорий, и для не-квантовых.
- ↑ Наиболее явным выходом за эти рамки по умолчанию (то есть без специальных терминологических уточняющих маркеров) являются уже упоминавшиеся теории, основанные на предположении о большей, чем 4, размерности фундаментального физического пространства-времени, начиная с теории Калуцы, до теории струн итд.
- ↑ При нужде такое разделение легко произвести, но нас сейчас интересует в первую построение наиболее полного набора векторных физических величин, а не их классификация, на этом мы и сосредоточимся.
- ↑ Для угловой скорости, правда, проще всего применить обратное рассуждение: поскольку векторное произведение угловой скорости и радиус-вектора есть скорость, значит угловая скорость — вектор (точнее — псевдовектор).
Источник
Физика и математика не обходятся без понятия «векторная величина». Ее необходимо знать и узнавать, а также уметь с нею оперировать. Этому обязательно стоит научиться, чтобы не путаться и не допускать глупых ошибок.
Как отличить скалярную величину от векторной?
Первая всегда имеет только одну характеристику. Это ее числовое значение. Большинство скалярных величин могут принимать как положительные, так и отрицательные значения. Их примерами может служить электрический заряд, работа или температура. Но есть такие скаляры, которые не могут быть отрицательными, например, длина и масса.
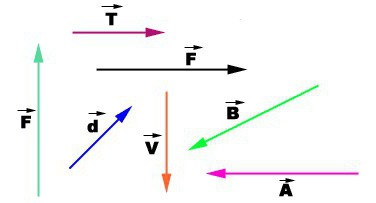
Векторная величина, кроме числовой величины, которая всегда берется по модулю, характеризуется еще и направлением. Поэтому она может быть изображена графически, то есть в виде стрелки, длина которой равна модулю величины, направленной в определенную сторону.
При письме каждая векторная величина обозначается знаком стрелки на буквой. Если идет речь о числовом значении, то стрелка не пишется или ее берут по модулю.
Какие действия чаще всего выполняются с векторами?
Сначала — сравнение. Они могут быть равными или нет. В первом случае их модули одинаковые. Но это не единственное условие. У них должны быть еще одинаковые или противоположные направления. В первом случае их следует называть равными векторами. Во втором они оказываются противоположными. Если не выполняется хотя бы одно из указанных условий, то векторы не равны.
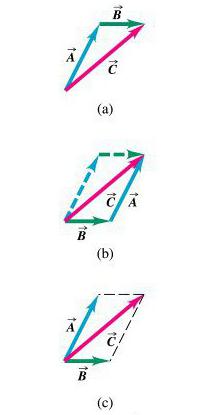
Потом идет сложение. Его можно сделать по двум правилам: треугольника или параллелограмма. Первое предписывает откладывать сначала один вектор, потом от его конца второй. Результатом сложения будет тот, который нужно провести от начала первого к концу второго.
Правило параллелограмма можно использовать, когда нужно сложить векторные величины в физике. В отличие от первого правила, здесь их следует откладывать от одной точки. Потом достроить их до параллелограмма. Результатом действия следует считать диагональ параллелограмма, проведенную из той же точки.
Если векторная величина вычитается из другой, то они снова откладываются из одной точки. Только результатом будет вектор, который совпадает с тем, что отложен от конца второго к концу первого.
Какие векторы изучают в физике?
Их так же много, как скаляров. Можно просто запомнить то, какие векторные величины в физике существуют. Или знать признаки, по которым их можно вычислить. Тем, кто предпочитает первый вариант, пригодится такая таблица. В ней приведены основные векторные физические величины.
| Обозначение в формуле | Наименование |
| v | скорость |
| r | перемещение |
| а | ускорение |
| F | сила |
| р | импульс |
| Е | напряженность электрического поля |
| В | магнитная индукция |
| М | момент силы |
Теперь немного подробнее о некоторых из этих величин.
Первая величина — скорость
С нее стоит начать приводить примеры векторных величин. Это обусловлено тем, что ее изучают в числе первых.
Скорость определяется как характеристика движения тела в пространстве. Ею задается числовое значение и направление. Поэтому скорость является векторной величиной. К тому же ее принято разделять на виды. Первый является линейной скоростью. Ее вводят при рассмотрении прямолинейного равномерного движения. При этом она оказывается равной отношению пути, пройденного телом, ко времени движения.
Эту же формулу допустимо использовать при неравномерном движении. Только тогда она будет являться средней. Причем интервал времени, который необходимо выбирать, обязательно должен быть как можно меньше. При стремлении промежутка времени к нулю значение скорости уже является мгновенным.
Если рассматривается произвольное движение, то здесь всегда скорость — векторная величина. Ведь ее приходится раскладывать на составляющие, направленные вдоль каждого вектора, направляющего координатные прямые. К тому же определяется он как производная радиус-вектора, взятая по времени.
Вторая величина — сила
Она определяет меру интенсивности воздействия, которое оказывается на тело со стороны других тел или полей. Поскольку сила — векторная величина, то она обязательно имеет свое значение по модулю и направление. Так как она действует на тело, то важным является еще и точка, к которой приложена сила. Чтобы получить наглядное представление о векторах сил, можно обратиться к следующей таблице.
| Сила | Точка приложения | Направление |
| тяжести | центр тела | к центру Земли |
| всемирного тяготения | центр тела | к центру другого тела |
| упругости | место соприкосновения взаимодействующих тел | против внешнего воздействия |
| трения | между соприкасающимися поверхностями | в сторону, противоположную движению |
Также еще векторной величиной является равнодействующая сила. Она определяется как сумма всех действующих на тело механических сил. Для ее определения необходимо выполнить сложение по принципу правила треугольника. Только откладывать векторы нужно по очереди от конца предыдущего. Результатом окажется тот, который соединяет начало первого с концом последнего.
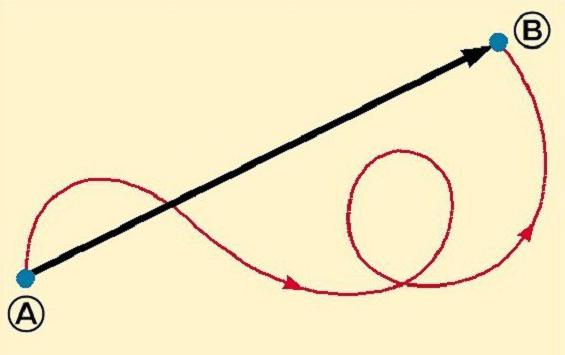
Третья величина — перемещение
Во время движения тело описывает некоторую линию. Она называется траекторией. Эта линия может быть совершенно разной. Важнее оказывается не ее внешний вид, а точки начала и конца движения. Они соединяются отрезком, который называется перемещением. Это тоже векторная величина. Причем оно всегда направлено от начала перемещения к точке, где движение было прекращено. Обозначать его принято латинской буквой r.
Здесь может появиться такой вопрос: «Путь — векторная величина?». В общем случае это утверждение не является верным. Путь равен длине траектории и не имеет определенного направления. Исключением считается ситуация, когда рассматривается прямолинейное движение в одном направлении. Тогда модуль вектора перемещения совпадает по значению с путем, и направление у них оказывается одинаковым. Поэтому при рассмотрении движения вдоль прямой без изменения направления перемещения путь можно включить в примеры векторных величин.
Четвертая величина — ускорение
Оно является характеристикой быстроты изменения скорости. Причем ускорение может иметь как положительное, так и отрицательное значение. При прямолинейном движении оно направлено в сторону большей скорости. Если перемещение происходит по криволинейной траектории, то вектор его ускорения раскладывается на две составляющие, одна из которых направлена к центру кривизны по радиусу.
Выделяют среднее и мгновенное значение ускорения. Первое следует рассчитывать как отношение изменения скорости за некоторый промежуток времени к этому времени. При стремлении рассматриваемого интервала времени к нулю говорят о мгновенном ускорении.
Пятая величина — импульс
По-другому его еще называют количеством движения. Импульс векторной величиной является из-за того, что напрямую связан со скоростью и силой, приложенной к телу. Обе они имеют направление и задают его импульсу.
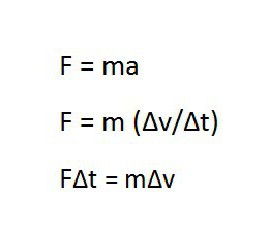
По определению последний равен произведению массы тела на скорость. Используя понятие импульса тела, можно по-другому записать известный закон Ньютона. Получается, что изменение импульса равно произведению силы на промежуток времени.
В физике важную роль имеет закон сохранения импульса, который утверждает, что в замкнутой системе тел ее суммарный импульс является постоянным.
Мы очень кратко перечислили, какие величины (векторные) изучаются в курсе физики.
Задача о неупругом ударе
Условие. На рельсах стоит неподвижная платформа. К ней приближается вагон со скоростью 4 м/с. Массы платформы и вагона – 10 и 40 тонн соответственно. Вагон ударяется о платформу, происходит автосцеп. Необходимо вычислить скорость системы “вагон-платформа” после удара.
Решение. Сначала требуется ввести обозначения: скорость вагона до удара — v1, вагона с платформой после сцепки — v, масса вагона m1, платформы — m2. По условию задачи необходимо узнать значение скорости v.
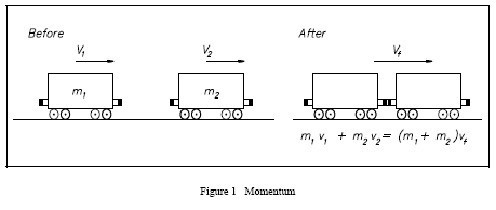
Правила решения подобных заданий требуют схематичного изображения системы до и после взаимодействия. Ось OX разумно направить вдоль рельсов в ту сторону, куда движется вагон.
В данных условиях систему вагонов можно считать замкнутой. Это определяется тем, что внешними силами можно пренебречь. Сила тяжести и реакция опоры уравновешены, а трение о рельсы не учитывается.
Согласно закону сохранения импульса, их векторная сумма до взаимодействия вагона и платформы равна общему для сцепки после удара. Сначала платформа не двигалась, поэтому ее импульс был равен нулю. Перемещался только вагон, его импульс — произведение m1 и v1.
Так как удар был неупругий, то есть вагон сцепился с платформой, и дальше он стали катиться вместе в ту же сторону, то импульс системы не изменил направления. Но его значение стало другим. А именно произведением суммы массы вагона с платформой и искомой скорости.
Можно записать такое равенство: m1 * v1 = (m1 + m2) * v. Оно будет верно для проекции векторов импульсов на выбранную ось. Из него легко вывести равенство, которое потребуется для вычисления искомой скорости: v = m1 * v1 / (m1 + m2).
По правилам следует перевести значения для массы из тонн в килограммы. Поэтому при подстановке их в формулу следует сначала умножить известные величины на тысячу. Простые расчеты дают число 0,75 м/с.
Ответ. Скорость вагона с платформой равна 0,75 м/с.
Задача с разделением тела на части
Условие. Скорость летящей гранаты 20 м/с. Она разрывается на два осколка. Масса первого 1,8 кг. Он продолжает двигаться в направлении, в котором летела граната, со скоростью 50 м/с. Второй осколок имеет массу 1,2 кг. Какова его скорость?
Решение. Пусть массы осколков обозначены буквами m1 и m2. Их скорости соответственно будут v1 и v2. Начальная скорость гранаты — v. В задаче нужно вычислить значение v2.
Для того чтобы больший осколок продолжал двигаться в том же направлении, что и вся граната, второй должен полететь в обратную сторону. Если выбрать за направление оси то, которое было у начального импульса, то после разрыва большой осколок летит по оси, а маленький — против оси.
В этой задаче разрешено пользоваться законом сохранения импульса из-за того, что разрыв гранаты происходит мгновенно. Поэтому, несмотря на то что на гранату и ее части действует сила тяжести, она не успевает подействовать и изменить направление вектора импульса с его значением по модулю.
Сумма векторных величин импульса после разрыва гранаты равна тому, который был до него. Если записать закон сохранения импульса тела в проекции на ось OX, то он будет выглядеть так: (m1 + m2) * v = m1 * v1 — m2 * v2. Из него просто выразить искомую скорость. Она определится по формуле: v2 = ((m1 + m2) * v — m1 * v1) / m2. После подстановки числовых значений и расчетов получается 25 м/с.
Ответ. Скорость маленького осколка равна 25 м/с.
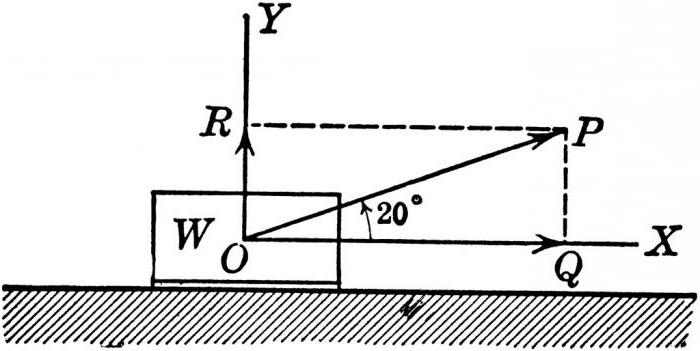
Задача про выстрел под углом
Условие. На платформе массой M установлено орудие. Из него производится выстрел снарядом массой m. Он вылетает под углом α к горизонту со скоростью v (данной относительно земли). Требуется узнать значение скорости платформы после выстрела.
Решение. В этой задаче можно использовать закон сохранения импульса в проекции на ось OX. Но только в том случае, когда проекции внешних равнодействующих сил равна нулю.
За направление оси OX нужно выбрать ту сторону, куда полетит снаряд, и параллельно горизонтальной линии. В этом случае проекции сил тяжести и реакции опоры на OX будут равны нулю.
Задача будет решена в общем виде, так как нет конкретных данных для известных величин. Ответом в ней является формула.
Импульс системы до выстрела был равен нулю, поскольку платформа и снаряд были неподвижны. Пусть искомая скорость платформы будет обозначена латинской буквой u. Тогда ее импульс после выстрела определится как произведение массы на проекцию скорости. Так как платформа откатится назад (против направления оси OX), то значение импульса будет со знаком минус.
Импульс снаряда — произведение его массы на проекцию скорости на ось OX. Из-за того, что скорость направлена под углом к горизонту, ее проекция равна скорости, умноженной на косинус угла. В буквенном равенстве это будет выглядеть так: 0 = – Mu + mv * cos α. Из нее путем несложных преобразований получается формула-ответ: u = (mv * cos α) / M.
Ответ. Скорость платформы определяется по формуле u = (mv * cos α) / M.
Задача о переправе через реку
Условие. Ширина реки по всей ее длине одинакова и равна l, ее берега параллельны. Известна скорость течения воды в реке v1 и собственная скорость катера v2. 1). При переправе нос катера направлен строго к противоположному берегу. На какое расстояние s его снесет вниз по течению? 2). Под каким углом α нужно направить нос катера, чтобы он достиг противоположного берега строго перпендикулярно к точке отправления? Сколько времени t потребуется на такую переправу?
Решение. 1). Полная скорость катера является векторной суммой двух величин. Первая из них течение реки, которое направлено вдоль берегов. Вторая — собственная скорость катера, перпендикулярная берегам. На чертеже получается два подобных треугольника. Первый образован шириной реки и расстоянием, на которое сносит катер. Второй — векторами скоростей.
Из них следует такая запись: s / l = v1 / v2. После преобразования получается формула для искомой величины: s = l * (v1 / v2).
2). В этом варианте задачи вектор полной скорости перпендикулярен берегам. Он равен векторной сумме v1 и v2. Синус угла, на который должен отклоняться вектор собственной скорости, равен отношению модулей v1 и v2. Для расчета времени движения потребуется разделить ширину реки на сосчитанную полную скорость. Значение последней вычисляется по теореме Пифагора.
v = √(v22 – v12), тогда t = l / (√(v22 – v12)).
Ответ. 1). s = l * (v1 / v2), 2). sin α = v1 / v2, t = l / (√(v22 – v12)).
Источник