Какими свойствами должен обладать производственный робот для его успешного

В статье рассказывается о выгоде автоматизации производства, производителях роботов, а также об основных типах промышленных роботов и примерах их применения в различных отраслях.
Содержание
Перспективы применения
Одна из причин быстро нарастающей автоматизации труда — робототехника становится дешевле. За прошлое десятилетие цена роботов снизилась почти на 30%, на следующие 10 лет прогнозируется уменьшение их стоимости еще на 20—22%. Робототехника не только продолжает развиваться на крупных предприятиях, но и уверенно продвигается в область среднего и малого бизнеса.
Почти все ведущие производители робототехники теперь выпускают роботов-манипуляторов и коллаборативных роботов, предназначенных для МСП, но, что интересно, крупные промышленные компании тоже часто покупают их наряду с традиционными промышленными роботами.
Компании Changying Precision Technology, Mcdonald’s, Vanguard Plastics Corp и FANUC Robotics провели ряд практических исследований. Результаты показали, что:
- роботы успешно заменяют людей и дешевле обходятся на производстве, чем работники;
- каждый может заменить несколько десятков рабочих вместе взятых;
- за 12-15 лет эксплуатации роботы не только окупают себя, но и увеличивают норму выработки продукции во множество раз.
Расчет конечной выгоды установки и эксплуатации робота из книги: Robotics application in flexible manufacturing systems: prospects and challenges in a developing country Bello S.K.
Финансовые реалии приведены зарубежные, но в общих чертах становится приблизительно понятен порядок сроков окупаемости.
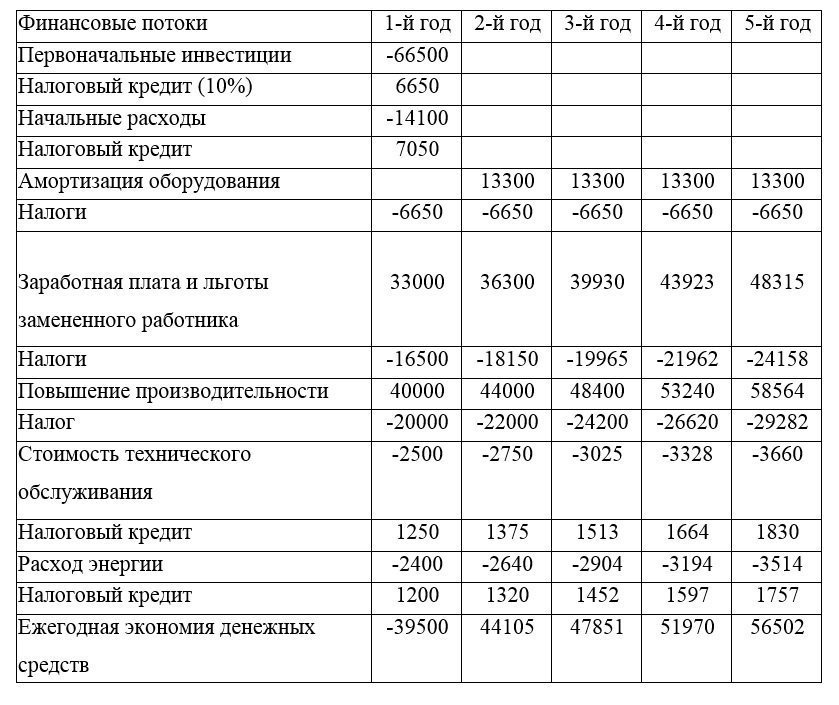
Источник: politsturm.com
Основные преимущества
- Снижение затрат на рабочую силу;
- ускорение производственных процессов;
- повышение точности и уменьшение брака;
- экономия материала;
- энергосбережение;
- пониженная стоимость обработки;
- совершенствование управления;
- более низкая стоимость инвентаря;
- гибкость при переходе на другой проект.
Производители промышленных роботов
Компаний по производству роботов очень много, рассмотрим некоторые из них.
Fanuc
Число установленных по всему миру роботов: 400 000 (данные 2018 года)

На фото: FANUC M900ia-600
Японская компания, специализирующаяся на автоматизации производства и крупнейший производитель промышленных роботов в мире, судя по количеству роботов-манипуляторов, установленных на заводах всего мира.
В прошлом году компания отметила производство своего 500-тысячного промышленного робота и расширяет ассортимент своей продукции, чтобы включать все новые типы роботов.
Ассортимент промышленных роботов FANUC очень велик: дельта-роботы, роботы для покраски, сварки, паллетирования, монтируемые сверху т. д.
Пример применения
Источник: fanuc.eu
Компания Flexlink, создающая автоматизированные конвейерные системы, использует на новой линии для фармацевтических блистерных упаковок дельта-робота FANUC M-1iA в паре с шарнирным роботом LR Mate 200iD. Первый робот выравнивает положение неправильно ориентированных изделий, а также оценивает их качество (некачественное возвращает). Если все в порядке, кладет изделие на промежуточную ленту и выравнивает перед зоной сборки. Далее LR Mate 200iD укладывает изделия в упаковку. Скорость работы 60 штук в минуту.
Видео показывает широкий спектр решений промышленной автоматизации с использованием роботов FANUC: Обслуживание станка, укладка на поддоны (паллетизация), удаление лишнего материала с детали, точечная сварка и пр.
Hanwha
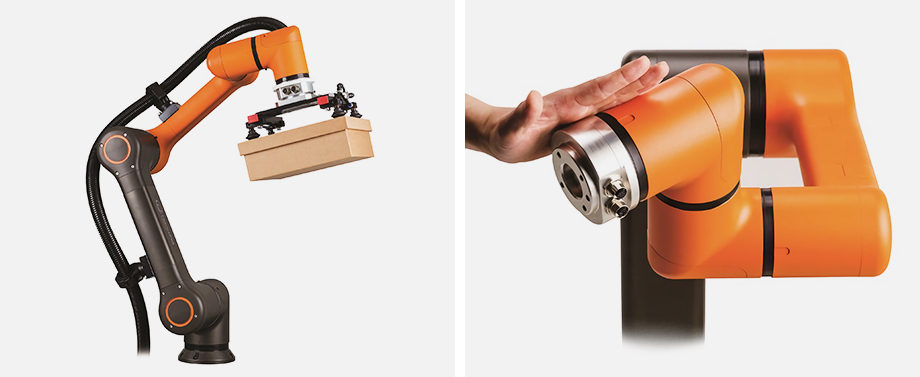
Hanwha HCR-5 cobot
Hanwha является одним из крупнейших конгломератов в Южной Корее. Производство роботов — лишь небольшая часть ее деятельности.
Ее коллаборативный робот — первый в своем роде в Южной Корее. Коботы — удачное решение для мелких производителей. Такие роботы стали популярны, потому что ими легче управлять, по сравнению с обычными промышленными, получая при этом те же преимущества. К тому же они дешевле в обслуживании.
Пример применения
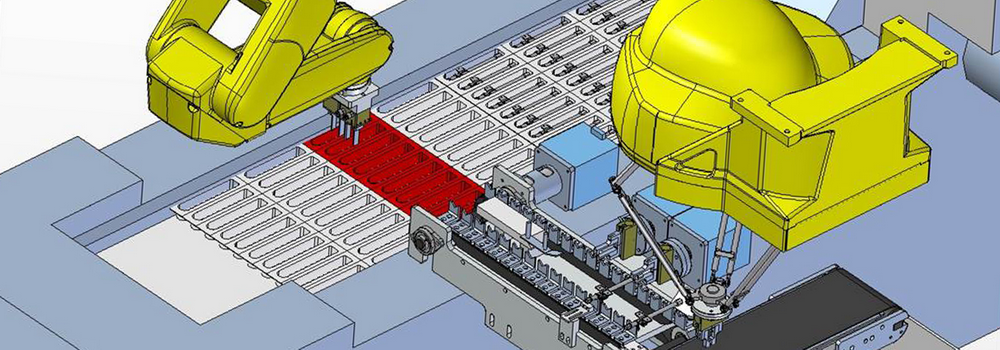
HYRobotics HCR-5 подает шоколад.
Видео демонстрирует, как робот забирает обработанные детали у станка ЧПУ.
Kuka
Количество установленных по всему миру роботов: 80 000

KUKA предлагает промышленных роботов в широком диапазоне, с различной грузоподъемностью и охватом. Их используют на самых разных производствах для выполнения операций по сварке, погрузке, паллетированию, упаковке, обработке, сборке и других.
Пример применения

Дуговая сварка с помощью роботов на заводе Gestamp.
Специалисты Gestamp производят рамы лестничного типа для автомобилей Volkswagen. Завод Gestamp в Билефельде использует полностью автоматическую систему дуговой сварки от KUKA Systems, чтобы обеспечить высочайшее качество, надежность процесса и высокую производительность при минимальной потребности в рабочей силе.
Universal Robots
Количество роботов, установленных по миру: 20 000
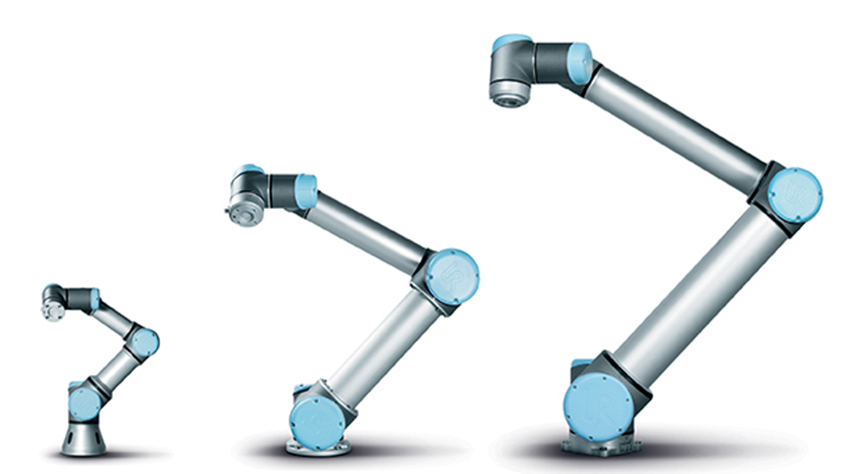
Universal Robots — это датский производитель небольших гибких промышленных коллаборативных роботов.
Компания в свое время предложила много нового, а главное — возможность использовать более мелких и недорогих роботов, которых не требовалось отделять от работников-людей. В 2008 году появился первый UR5. В 2012 году был запущен второй робот — UR10. В 2015 году анонсировали UR3.
Фантастический успех Universal, вероятно, отчасти связан с тем, что ее робот был первым коботом в его нынешнем виде — автономным и работающим в сотрудничестве с людьми. Но что еще более важно — это превосходная конструкция, которой подражают другие производители роботов.
Пример применения
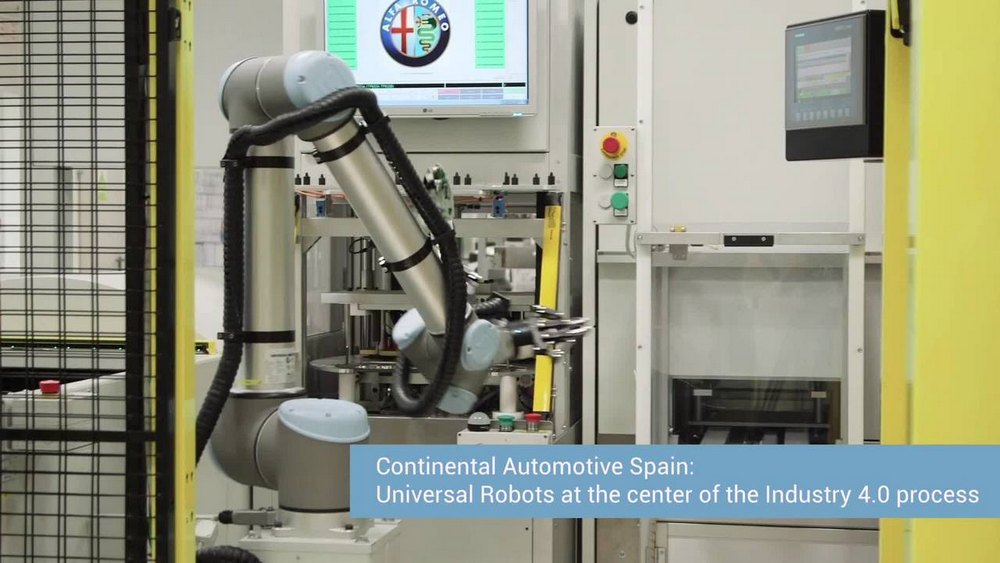
Робот UR на заводе Continental работает со станком с ЧПУ.
В 2016 году компания Continental приобрела несколько роботов UR 10 для автоматизации погрузки и разгрузки печатных плат и монтажа компонентов Время перехода с одного режима обработки на другой сократилось вдвое, по сравнению с ручным трудом.
uFactory
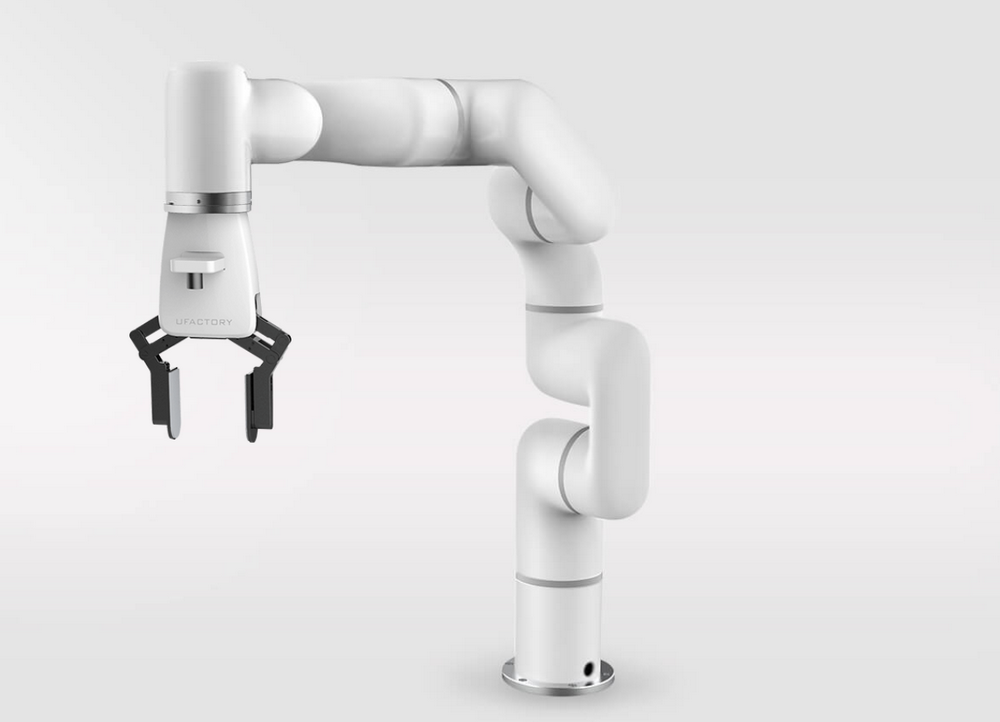
UFactory xArm
UFactory — китайский стартап. Выпустил настольных роботов-манипуляторов для обучения и малого бизнеса, экономичных и интуитивно понятных, среди них uArm Swift Pro — модель для образования и xArm System — линейка коботов для производства.
xArm выпускается в трех версиях: 5-шарнирный xArm 5 Lite, с грузоподъемность до 2 кг, более гибкий 6-шарнирный xArm6 (5 кг) и 7-шарнирный xArm 7, который перемещает груз до 3,5 кг.
Пример применения
Видео демонстрирует использование uArm Swift Pro для 3D-печати.
Применение промышленных роботов в различных отраслях промышленности
В апреле 2019 года International Federation of Robotics предварительно оценила уровень внедрения роботов на 2018 г. по отраслям во всем мире:
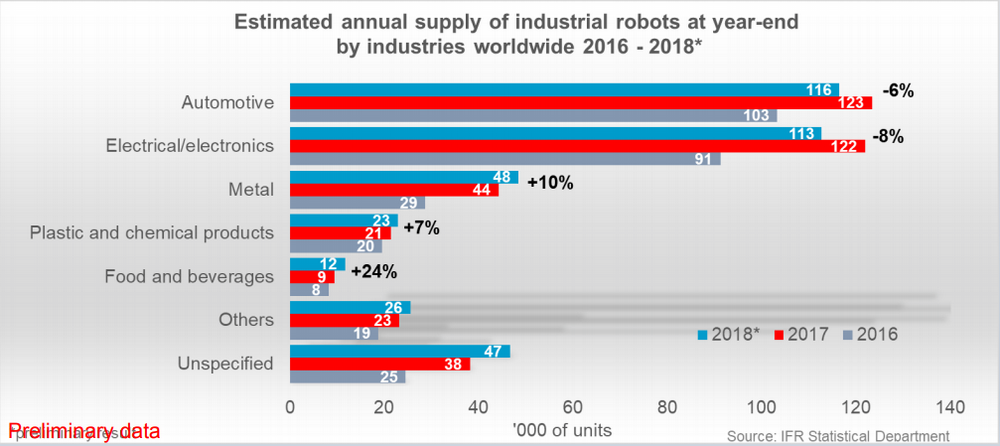
Автомобильная промышленность по-прежнему лидирует по внедрению робототехники. Вместе с электротехнической/ электронной отраслью они охватывают примерно 60% рынка. Хотя количество продаж несколько снизилось по сравнению с 2017 годом, что неудивительно — в этих отраслях роботизация началась давно и проводилась бурными темпами — прогноз на будущее весьма положительный.
Нарастают темпы внедрения промышленных роботов в металлургии, химической, пищевой промышленности и др.
Промышленные роботы могут применяться везде, где требуется точность, скорость, где надо выполнять монотонные или опасные для человека операции или работать в агрессивной среде…
Ниже даны всего лишь несколько примеров использования робототехники в различных отраслях.
Автомобильная промышленность

Линия сборки Audi. Источник: fanuc.eu
AUDI Hungary – одна из компаний с крупнейшим оборотом и экспортом в Венгрии, производит автомобили при поддержке промышленных роботов FANUC
Производство электроники
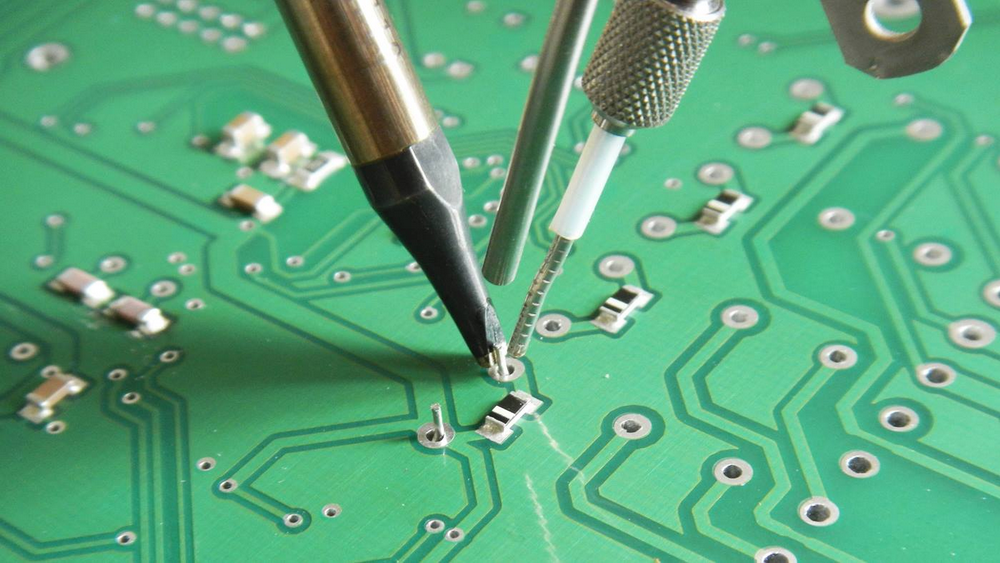
Робот KR 6 R900 держит плату и паяет. Источник: kuka.com
Компания ALNEA Sp. z.o.o. специализируется производстве тестовых приборов по индивидуальному заказу. Для селективной пайки печатных плат используется робот KUKA KR 6 R900. В результате ALNEA добилась высочайшей точности пайки и снижения времени производственного процесса вдвое.
Видео показывает роботизированную сборку модулей ЦП и памяти на печатной плате.
Пищевая промышленность

На фото: UR коботы упаковывают продукты питания. Источник: universal-robots.com
Atria Scandinavia — шведский производитель вегетарианских продуктов и деликатесов. Каждый день упаковывается, маркируется и укладывается в штабеля масса продуктов. Процесс оптимизирован: коллаборативные манипуляторы UR 10 готовят к отправке более 200 позиций на каждой производственной линии в час. Срок окупаемости роботов — 1 год.
Сельское хозяйство

Agrobot SW6010. Источник: agrobot.com
Робот — сборщик клубники. На первый взгляд может показаться, что это трактор. Машина использует сенсоры и манипуляторы, чтобы обнаружить спелую клубнику и сорвать ее.
Типы промышленных роботов
Роботы классифицируются по самым разнообразным критериям: по выполняемым операциям, грузоподъемности, управлению, устройству и техническим особенностям. Робототехника развивается так стремительно, что ГОСТы и стандарты за ней не успевают. Часто модели можно отнести не к одной, а к нескольким категориям.
Здесь мы проведем условное деление на основные типы.
Если хотите больше узнать о классификации роботов — следите за обновлениями, скоро у нас появится отдельная статья, подробно раскрывающая эту тему.
Специализированные роботы
Это роботы для выполнения операций определенного типа, чья функциональность определена конструктивно. К ним относятся сварочные роботы, роботы для монтажа компонентов на электронных печатных платах, медицинские роботы и т.д.
Роботы для паллетирования
Их задача укладывать изделия в паллеты по заданной программой схеме и выполнять погрузочно-разгрузочные работы.

Источник: fanucamerica.com
Роботы fanuc серии M410 предназначены для работы со средними и тяжелыми грузами (до 700 кг)
Роботы для сварки

Источник: www.fanucamerica.com
Роботы серии FANUC Arc Mate могут выполнять дуговую и лазерную сварку, а также паять.
Роботы для покраски
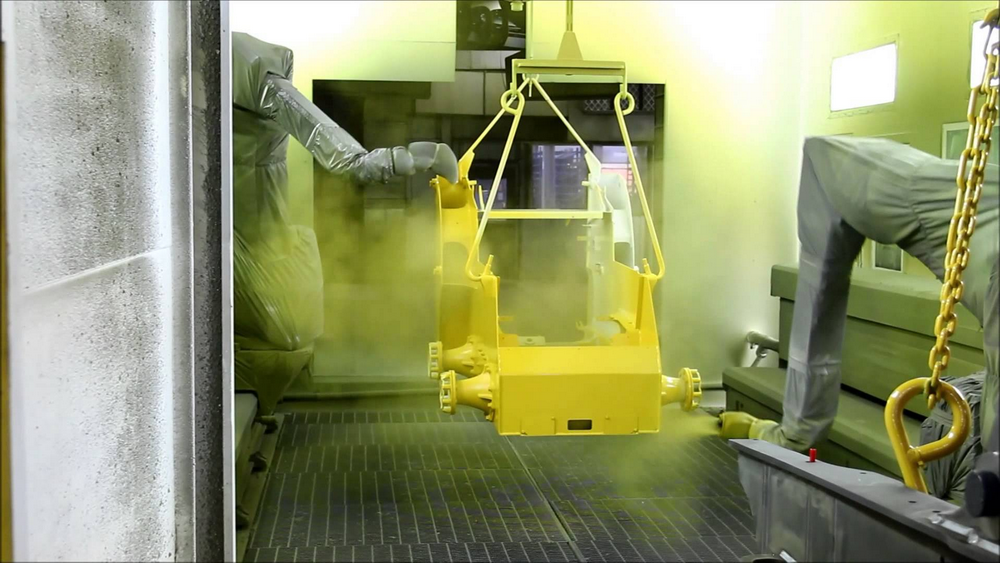
Два робота FANUC Paint в процессе окраски. Источник: nordrobotics.lt
Оснащенные распыляющими устройствами роботы успешно применяются для нанесения лакокрасочных покрытий в производствах разных направлений — от создания потребительских товаров, до тяжелого машиностроения.
Роботы-манипуляторы
Традиционные

Источник: sealing-system.dk/
Традиционные промышленные роботы-манипуляторы представляют собой робо-руку на сервоприводах с большим количеством степеней свободы, движения которой ограничены обычно ее размерами и тем, куда может дотянуться закрепленный на ней инструмент. Такого типа роботы могут поворачиваться вокруг основания и выдвигать инструмент под разными углами, совершая движения со сложной траекторией.
Полезны при выполнении множества различных операций — применение ограничено лишь наличием инструментов, которые можно интегрировать в конструкцию.
Это могут быть захваты или пневматические присоски — служат для перемещения предметов, погрузки и паллетирования; аппараты для сварки или 3D-печати, распылители краски и многое другое.

Робот KUKA KR AGILUS делает болты с нарезкой и проверяет результат. Источник: kuka.com
Дельта-роботы

Источник: coro.etsmtl.ca
Часто выполняют фасовочные и монтажные работы на конвейерах роботы, основанные на дельтообразной механике. Роботы такого типа конструктивно устроены так, что совершают движения очень точно и быстро. Такая конфигурация широко применяется в пищевой, фармацевтической и электронной промышленности — они раскладывают электронные компоненты по печатным платам для последующей пайке, наполняют упаковки мелкими деталями и производят другие операции, при которых нужна не только точность, но и скорость.

На фото: Дельта-роботы FANUC M-2iAs пакуют бельгийские вафли. Источник: fanuc.eu
Роботы типа SCARA

Источник: hannovermesse.de
Основанные на кинематической схеме SCARA, эти роботы имеют отличную точность и повторяемость — выше, чем у традиционных манипуляторов рычажного типа и дельта-роботов — но, как правило, меньше степеней свободы и намного меньшую область работы, что обусловлено конструктивными особенностями.

На фото: OMRON i4 SCARA, fa.omron.co.jp
Применяются там, где важна точность и нет необходимости в большой области доступа — для комплектации изделий деталями, контроля качества, захвата и перемещения комплектующих.

На фото: Робот Epson Scara очень быстро сортирует мячи для гольфа.
Роботы для обслуживания станков
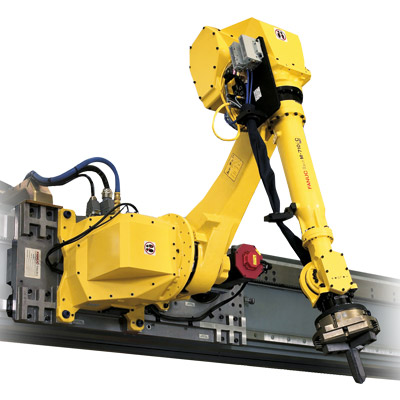
Фото: fanuc.eu
Роботы могут обслуживать один станок или несколько сразу. Некоторые модели подходят для того, чтобы монтироваться сверху: они крепятся на рельс, под прямым углом к стене, или на линейную ось, к потолку. Это удобно, когда производственная площадь ограничена. По направляющим роботы могут перемещаться от станка к станку. Это могут быть роботы с разным устройством, в зависимости от рациональности применения того или иного механизма на данном участке производства.
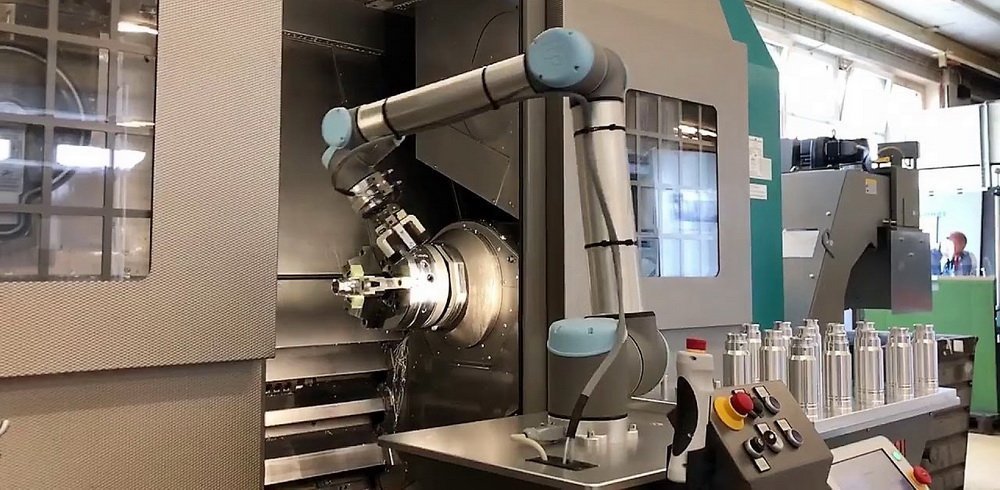
Робот UR работает с токарным станком с ЧПУ, источник: CNC Programmer
Применяются для загрузки материала в станки с ЧПУ, выемки готовых деталей, технического обслуживания станков — смазки, замены режущего инструмента или печатающих головок.

Промышленный робот обслуживает станок с ЧПУ. Источник: cnc-machine-tools.com
Коллаборативные роботы

Источник: robots.com
Коллаборативные роботы — коботы — работают в непосредственной близости от человека и вместе с ним. Их система обратной связи, построенная на различных сенсорах и специальных алгоритмах работы, позволяет избежать столкновения движущихся частей робота с человеком и другими посторонними объектами, не предусмотренными программой работы.
Изначально коботами назывались компактные роботы-помощники, как на фото выше, но сейчас к ним можно отнести всех роботов, способных на тесное сотрудничество с человеком без опасности для него.
Подробнее и больше о коллаборативных роботах узнайте из нашей недавней статьи «Коллаборативный робот: что это такое — определение и применение».
Заключение
Сегодня робототехника используется шире, чем когда-либо, производителям все чаще приходится использовать автоматизацию, чтобы оставаться конкурентоспособными.
Применение роботов на производстве рентабельно для компании практически любого размера — оно обычно повышает не только производительность, но и качество продукции, а также улучшает условия труда для живых сотрудников.
Всем, кто хочет автоматизировать свое производство, специалисты Top 3D Shop помогут выбрать наиболее подходящие устройства из широкого ассортимента промышленных роботов. Обращайтесь!
Подписывайтесь на наш телеграм-канал с отборными кейсами Роботизации и Автоматизации со всех уголков мира:
https://tglink.ru/easy_robotics
Узнайте больше о возможностях усовершенствовать ваше производство интеграцией нового оборудования:
Источник
Критерии оценивания работы.
Задания первой части оцениваются в 1 балл, если ученик выбрал верный вариант ответа. Максимальное количество за первую часть – 10 баллов. Исправления в первой части работы не допускаются.
Задания В1-В3 второй части оцениваются в 2 балла, если ученик верно ответил на все вопросы. Если в заданиях В1-В3 ученик выбрал только два верных соответствия, а при выборе третьего ошибся, то за задание ставится 1 балл. Задания В4 и В5 оцениваются в 3 балла. Если при выполнении заданий В4 и В5 учащийся допустил 1 ошибку, то выставляется 2 балла, за 2 ошибки -1 балл. Максимальное количество за задания второй части – 12 баллов.
Оценка «3» ставится, если ученик набрал не менее 9 баллов за работу.
Оценка «4» ставится, если количество набранных баллов не менее 15.
Оценка «5» ставится, если количество набранных баллов не менее 19.
Максимальное количество баллов за всю работу 22 балла.
1 вариант
Часть1
Первая часть работы состоит из заданий с выбором ответа.
Необходимо выбрать один из представленных вариантов ответа.
А1. Драйвер – это:
Устройство компьютера; Компьютерный вирус; Программа, обеспечивающая работу устройства компьютера; Антивирусная программа.
А2. Устройством вывода является:
Настольные динамики; Клавиатура; Мышь; СD-ROM.
А3. Параллельным является порт:
СОМ1; СОМ2; LPT1; СОМ3.
А4. Компьютеры с 23-разрядной адресной шиной могут максимально использовать память до:
0,5 Мбайт; 1 Мбайт; 4 Мбайт; 16 Мбайт.
А5. Что такое компьютерный вирус?
1. Прикладная программа.
2. Системная программа.
3. Программа, выполняющая на компьютере несанкционированные действия.
4. База данных.
А6. Какие существуют основные средства защиты?
1. Резервное копирование наиболее ценных данных.
2. Аппаратные средства.
3. Программные средства.
А7. Какими свойствами должен обладать производственный робот для его успешного использования в качестве модели человека?
1. Способность мыслить и разговаривать.
2. Способность ходить.
3. Умение брать и перемещать детали, закручивать болты и гайки и пр.
4. Обеспечение внешнего сходства с человеком (форма и размер человеческого тела).
А8. Совокупностью взаимосвязанных объектов, которые называются элементами системы, является:
Информационная модель; Система; Объект; Тип информационной модели.
А9. Зрительные образы объектов, зафиксированные на каком-либо носителе информации, называются:
Математическими моделями; Формальными информационными моделями; Формальными логическими моделями; Образными моделями.
А10. Модель какой системы управления представлена на схеме?

Замкнутой системы управления. Разомкнутой системы управления. Обобщенная система управления. Разобщенная система управления.
Часть 2
В заданиях В1-В3 необходимо установить соответствие.
В1. Установите соответствие между характеристиками процессора и их влиянием на его производительность
А. Тактовая частота | 1. Количество двоичных разрядов, которые могут передаваться или обрабатываться компьютером одновременно |
Б. Разрядность | 2. Интегральная характеристика, которая зависит от частоты процессора, от его разрядности и особенностей архитектуры |
В. Производительность | 3. Важнейшая характеристика, определяющая быстродействие процессора |
В2. Установите соответствие между принципом работы антивирусных программ и их видами.
А. Принцип работы основан на подсчете контрольных сумм для присутствующих на диске файлов. | 1. Полифаги |
Б. Программы, перехватывающие «вирусоопасные» ситуации и сообщающие об этом пользователю | 2. Ревизоры |
В. Принцип работы основан на проверке файлов, загрузочных секторов дисков и оперативной памяти и поиске в них известных и новых вирусов. | 3. Блокировщики |
В3. Установите соответствие между исследованием модели и этапами ее построения на конкретном примере движения тела под углом к горизонту.
А. Мячик можно считать материальной точкой. Ускорение свободного падения постоянно g=9,8 м/с2 . Сопротивление воздуха можно пренебречь. | 1.Качественная описательная модель |
Б. Необходимо задать мальчику скорость и угол попадания мяча в мишень. | 2. Формальная модель |
В. ℓ=s∙tgα – g∙s2 /(2∙v02∙cos2α), 0 ≤ ℓ≤ h | 3.Содержательная постановка задачи |
В заданиях В4, В5 необходимо записать ответ.
В4. Доступ к файлу http. txt, находящемуся на сервере , осуществляется по протоколу ftp. В таблице фрагменты адреса файла закодированы буквами от А до Ж. Запишите последовательность этих букв, кодирующую адрес указанного файла в сети Интернет.
A | / |
Б | .com |
В | ftp |
Г | |
Д | .txt |
Е | http |
Ж | :// |
Ответ:
В5. В таблице приведена стоимость перевозок между соседними железнодорожными станциями. Нарисуйте схему, соответствующую таблице.
A | B | C | D |
A | 4 | 5 | |
B | 4 | 3 | 6 |
C | 3 | ||
D | 5 | 6 |
Ответ:
2 вариант
Часть1
Первая часть работы состоит из заданий с выбором ответа.
Необходимо выбрать один из представленных вариантов ответа.
А1. Устройство, выполняющее арифметические и логические операции и управляющее другими устройствами компьютера, называется:
Контролером; Клавиатурой; Монитором; Процессором.
А2. Устройством ввода является:
Клавиатура; Принтер; Дисплей; Наушники.
А3. Стандартным режимом отображения символов на экране дисплея является:
8 х 12 пикселей; 8 х 16 пикселей; 12 х 16 пикселей; 16 х 16 пикселей.
А4. Компьютеры с 35-разрядной адресной шиной могут максимально использовать память до:
4 Мбайт; 16 Мбайт; 4 Гбайт; 16 Гбайт.
А5. Что называется вирусной атакой?
1. Неоднократное копирование кода вируса в код программы.
2. Отключение компьютера в результате попадания вируса.
3. Нарушение работы программы, уничтожение данных, форматирование жесткого диска.
А6. Какие существуют вспомогательные средства защиты?
1. Аппаратные средства.
2. Аппаратные средства и антивирусные программы.
3. Программные средства.
А7. Неадекватной моделью для объекта Земной шар является:
Карта; Глобус; Воздушный шарик.
А8. Тип информационной модели, объекты которой распределены по уровням, называется:
Сетевой информационной моделью; Иерархической информационной моделью; Табличной информационной моделью; Физической моделью.
А9. Информационные модели, построенные с помощью различных языков, называются:
Математическими моделями; Формальными информационными моделями; Формальными логическими моделями; Знаковыми информационными моделями.
А10. Модель какой системы управления представлена на схеме?

Замкнутой системы управления. Разомкнутой системы управления. Обобщенная система управления. Разобщенная система управления.
Часть 2
В заданиях В1-В3 необходимо установить соответствие.
В1. Установите соответствие элементов структуры операционной системы и их основными функциями.
А. Командный процессор | 1. Специальные программы, которые обеспечивают работу устройств и согласование информационного обмена с другими устройствами, а также позволяют производить настройку некоторых параметров устройств |
Б. Драйверы устройств | 2. Специальные программы, позволяющие обслуживать диски, выполнять операции с файлами, работать в компьютерных сетях и тд. |
В. Сервисные программы | 3. Специальная программа, которая запрашивает у пользователя команды и выполняет их. |
В2. Установите соответствие между средой обитания вирусов и их типами.
А. Различными способами внедряются в исполнимые файлы и обычно активизируются при их запуске | 1. Загрузочные вирусы |
Б. Заражают файлы документов Word и электронных таблиц Excel, являются фактически командами, которые встраиваются в документ | 2. Файловые вирусы |
В. Вирусы записывают себя в загрузочный сектор диска. | 3. Макровирусы |
В3. Установите соответствие между этапами построения и исследованием модели на конкретном примере поиска оптимальных вариантов раскроя ткани для пошива изделия определенного размера.
А. Содержательная постановка задачи | 1. Количество отрезов ткани не может быть числом отрицательным. |
Б. Формальная модель | 2. F=X1+X2+X3 , где X1, X2, X3 – количество отрезов ткани, раскроенное соответствующим способом. F минимально. |
В. Качественная описательная модель | 3. При раскройке ткани получают детали изделия тремя возможными способами. Необходимо определить оптимальное сочетание способов раскроя при расходовании наименьшего количества ткани |
В заданиях В4, В5 необходимо записать ответ.
В4. Доступ к файлу , находящемуся на сервере gov. de, осуществляется по протоколу ftp. В таблице фрагменты адреса файла закодированы буквами от А до Ж. Запишите последовательность этих букв, кодирующую адрес указанного файла в сети Интернет
A | / |
Б | :// |
В | gov |
Г | |
Д | ftp |
Е | .de |
Ж | .net |
Ответ:
В5. В таблице приведена стоимость перевозок между соседними железнодорожными станциями. Постройте схему, соответствующую таблице.
A | B | C | D | Е |
A | 1 | 4 | 1 | |
B | 1 | 3 | ||
C | 4 | 2 | ||
D | 3 | |||
Е | 1 | 2 |
Ответ:
Ответы 1 вариант
1 часть.
А1 | А 2 | А 3 | А 4 | А 5 | А 6 | А 7 | А 8 | А 9 | А 10 |
3 | 1 | 3 | 2 | 3 | 1 | 4 | 2 | 4 | 2 |
2 часть
В1 | А3 Б1 В2 |
В2 | А2 Б3 В1 |
В3 | А1 Б3 В 2 |
В4 | ВЖГБАЕД |
В5 |
|

Ответы 2 вариант
1 часть.
А1 | А 2 | А 3 | А 4 | А 5 | А 6 | А 7 | А 8 | А 9 | А 10 |
4 | 1 | 2 | 3 | 3 | 2 | 3 | 2 | 4 | 1 |
2 часть
В1 | А3 Б1 В2 |
В2 | А2 Б3 В1 |
В3 | А3 Б2 В1 |
В4 | ДБВЕАГЖ |
В5 |
|

Источник